Project: engagement_recognition
License: BSD
Dependencies:
- engagement_msgs
- engagement_srvs
- roscpp
Used by:
None
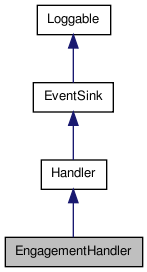
EngagementHandler Class Reference
#include <engagement_handler.h>
Public Member Functions | |
| APServiceResponse | adjPairService (ros::Message *message) |
| void | castEvent (Event event) |
| bool | compareAdditional (std::vector< std::string > additional, std::string compare) |
| ServiceResponse | dirGazeService (ros::Message *message, std::vector< std::string > objects) |
| EngagementHandler (std::string actor, EventSink *parent) | |
| EngagementHandler () | |
| ServiceResponse | mfGazeService (ros::Message *message) |
| void | updateDirectedGazeRecognizer (std::string object) |
Detailed Description
This class provides the concrete implementation of a Handler which is responsible for managing the four Engagement Recognizers: DirectedGazeRecognizer, MutualFacialGazeRecognizer, AdjacencyPairRecognizer, and BackchannelRecognizer. It creates one instance of the MutualFacialGazeRecognizer, the AdjacencyPairRecognizer and the BackchannelRecognizer and it creates one instance of the DirectedGazeRecognizer for each object that is found in the environment.
Definition at line 56 of file engagement_handler.h.
Constructor & Destructor Documentation
| EngagementHandler::EngagementHandler | ( | ) |
Default constructor for the EngagementHandler class.
Definition at line 43 of file engagement_handler.cpp.
| EngagementHandler::EngagementHandler | ( | std::string | actor, | |
| EventSink * | parent | |||
| ) |
Constructor for the EngagementHandler class, takes an Actor ID, Robot and EventSink parent object.
Definition at line 62 of file engagement_handler.cpp.
Member Function Documentation
| APServiceResponse EngagementHandler::adjPairService | ( | ros::Message * | message | ) | [virtual] |
The adjacency pair service was called.
- Parameters:
-
message The message that was received
- Returns:
- The status returned
Implements Handler.
Definition at line 230 of file engagement_handler.cpp.
| void EngagementHandler::castEvent | ( | Event | event | ) | [virtual] |
Method responsible for casting an event.
This function is responsible for casting a single event which contains additional information associated with it.
- Parameters:
-
event The event that has been cast
Implements EventSink.
Definition at line 83 of file engagement_handler.cpp.
| bool EngagementHandler::compareAdditional | ( | std::vector< std::string > | additional, | |
| std::string | compare | |||
| ) | [virtual] |
Compare the additional data as specified.
- Parameters:
-
additional The additional data compare How to compare the data
- Returns:
- Success of the comparison
Implements EventSink.
Definition at line 93 of file engagement_handler.cpp.
| ServiceResponse EngagementHandler::dirGazeService | ( | ros::Message * | message, | |
| std::vector< std::string > | objects | |||
| ) | [virtual] |
The directed gaze service was called.
- Parameters:
-
message The message that was received objects The objects that were received
- Returns:
- The status returned
Implements Handler.
Definition at line 119 of file engagement_handler.cpp.
| ServiceResponse EngagementHandler::mfGazeService | ( | ros::Message * | message | ) | [virtual] |
The mutual facial gaze service was called.
- Parameters:
-
message The message that was received
- Returns:
- The status returned
Implements Handler.
Definition at line 187 of file engagement_handler.cpp.
| void EngagementHandler::updateDirectedGazeRecognizer | ( | std::string | object | ) | [virtual] |
Update the directed gaze recognizers using the object name. This method ensures that one DirectedGazeRecognizer exists for the given object id. If no recognizer exists one is created for this object.
- Parameters:
-
object The object name
Implements Handler.
Definition at line 100 of file engagement_handler.cpp.
The documentation for this class was generated from the following files:
- engagement_recognition/src/recognition/handlers/engagement_handler.h
- engagement_recognition/src/recognition/handlers/engagement_handler.cpp